隨著全球人口老齡化進程加速和慢性病發病率上升,康復醫療需求日益增長。傳統康復治療高度依賴治療師,存在人力成本高、訓練強度與精度難以標準化等挑戰。康復機器人作為一種融合了機器人學、生物力學、臨床醫學與人工智能的智能康復設備,正成為健康醫療產品設計領域的前沿熱點。它不僅能提供高強度、重復性、精準化的訓練,還能通過數據采集與分析,實現個性化康復方案的制定與動態調整,極大地提升了康復效率與效果。
康復機器人設計的核心原則
成功的康復機器人設計并非簡單的機械疊加,而是需要遵循以下核心原則:
- 以用戶為中心:設計需充分考慮患者(用戶)的生理、心理狀態及使用場景。例如,對于上肢功能障礙者,設備需輕便、符合人體工學;對于下肢康復,則需確保極高的安全性與穩定性。人機交互界面應簡潔直觀,降低學習成本。
- 安全至上:機器人直接與患者身體接觸并施加力,必須內置多重安全機制,如力/力矩傳感器、急停按鈕、軟件限位、防碰撞設計等,確保在任何異常情況下都能立即停止或切換到安全模式。
- 主動參與與動機激勵:現代康復理念強調患者的主動參與。因此,設計常融入游戲化(Gamification) 元素和虛擬現實(VR)技術,將枯燥的訓練轉化為有趣的互動任務,通過實時視覺反饋和成就系統,持續激勵患者。
- 數據驅動與個性化:內置傳感器持續采集運動范圍、力度、耐力、協調性等數據,通過算法分析,為治療師提供客觀評估報告,并能自動調整訓練難度與模式,實現“一人一策”的個性化康復。
- 臨床有效性與循證支持:設計必須基于堅實的臨床醫學證據,并與康復醫師、治療師緊密合作,確保其訓練模式符合神經可塑性原理和運動學習理論,真正促進功能恢復。
多款創新康復機器人設計案例展示
以下案例展示了不同功能定位的康復機器人如何將上述原則轉化為實際產品。
案例一:上肢康復機器人——以“鏡像療法”與AI適配為特色
產品概覽:一款針對中風后偏癱患者的上肢(特別是手部與腕部)精細化功能康復機器人。
設計亮點:
- 仿生結構與柔性驅動:采用外骨骼式輕量化設計,材質親膚透氣,關節自由度模擬人手自然運動。采用柔性氣動或電機驅動,提供柔順、自然的助力或阻力。
- 集成“鏡像療法”:設備配備屏幕,當患者嘗試移動患側手臂時,系統通過識別健康側手臂的微小意圖(如肌電信號),驅動患側執行相同動作,并在屏幕上以虛擬形象對稱展示,從視覺和運動上強化大腦對患側的控制信號,促進神經通路重建。
- AI自適應難度系統:內置AI算法根據患者每次訓練的表現(如完成度、顫抖程度、疲勞指標),實時微調輔助力的大小、任務復雜度及虛擬場景的挑戰性,確保訓練始終處于“最近發展區”,既不會因太簡單而無效,也不會因太困難而挫傷信心。
案例二:下肢康復外骨骼機器人——專注于步態重建與社區/家庭應用
產品概覽:一款可穿戴式下肢外骨骼機器人,旨在幫助脊髓損傷、腦卒中或肌無力患者重新站立和行走。
設計亮點:
- 多模態步態訓練:提供“全輔助步態”、“助力隨動”和“阻抗訓練”多種模式。在早期,機器人完全帶動患者腿部完成標準生理步態;隨著功能恢復,系統逐漸減少助力,甚至增加可控阻力,鼓勵患者主動發力。
- 輕量化與動力優化:采用高強度碳纖維框架和高能量密度電池,大幅減輕自重,延長單次使用時間。驅動單元位于髖、膝關節,算法能智能識別用戶意圖(如身體重心微移),實現人機步態的柔順同步。
- 家庭友好型設計:相較于大型落地式步態訓練設備,此款設計緊湊,配備易用的手持控制器和APP,支持患者在家庭或社區環境中進行日常訓練,并可將數據同步至云端,供遠程康復團隊監督指導,實現了從醫院到家庭的康復連續性。
案例三:手功能康復機器人——聚焦于抓握與精細動作
產品概覽:一款桌面式或可穿戴式手部康復機器人,針對手部屈伸、抓握、對指等精細動作進行訓練。
設計亮點:
- 模塊化與可定制:設計考慮到手部功能障礙的多樣性(如僅手指無力、或全手僵硬),采用模塊化結構,可以針對單個或多個手指進行組合訓練。治療師可根據評估結果快速配置訓練模塊。
- 沉浸式VR任務訓練:結合高精度動作捕捉與VR頭盔,患者可在虛擬場景中進行諸如抓取虛擬水果、擰開瓶蓋、彈奏鋼琴等豐富多樣的功能性任務。這種情境化訓練能更好地激發運動皮質活性,促進功能向日常生活轉移。
- 生物反饋與社交連接:設備能將肌電信號或運動數據轉化為直觀的視覺(如能量條增長)或聽覺反饋。部分設計還支持多患者在線進行協作性游戲,在康復過程中融入社交元素,減輕孤獨感,提升堅持訓練的意愿。
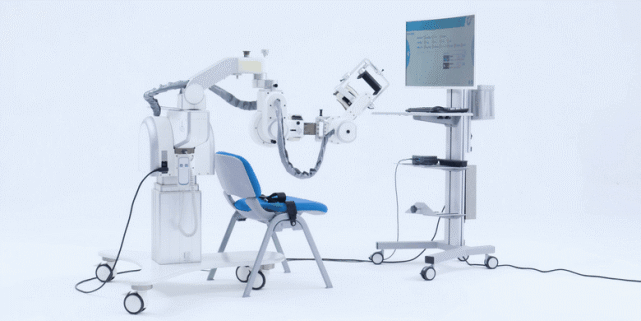
案例四:全身康復機器人平臺——多關節聯動與平衡訓練
產品概覽:一種大型、多自由度的懸吊式或座椅式機器人系統,用于進行軀干核心穩定性、坐站轉移、以及多關節協調性訓練。
設計亮點:
- 三維空間運動支持:平臺可在三維空間內提供支撐、減重和運動引導,允許患者進行前后、左右、旋轉乃至失狀面內的復合運動,模擬日常生活中復雜的重心轉移和姿勢調整。
- 實時平衡評估與訓練:通過底部的力平臺和全身運動傳感器,精確量化患者的壓力中心、搖擺幅度等平衡參數,并即時生成動態平衡挑戰任務(如“接住”屏幕上飛來飛去的球),實現動態平衡能力的量化訓練。
- 一體化評估與訓練:系統集成了標準化評估模塊,可在訓練前后自動完成 Fugl-Meyer、Berg平衡量表等部分項目的自動化評估,生成對比報告,極大提高了臨床工作效率。
未來趨勢與展望
康復機器人的設計將向更智能化、柔性化、融合化與普惠化發展:
- 腦機接口(BCI)的深度集成:通過直接解讀大腦或神經信號來控制機器人,為重度癱瘓患者提供全新的康復路徑。
- 軟體機器人技術:采用柔性材料與驅動方式,使設備更貼合人體,安全性更高,體驗更舒適。
- 數字孿生與元宇宙康復:為患者創建其身體功能的數字孿生模型,在元宇宙中進行超前模擬訓練與效果預測。
- 成本控制與普及:通過優化設計、模塊化和規模化生產,降低設備成本,讓先進康復技術惠及更多基層醫療機構和家庭。
康復機器人作為健康醫療產品的杰出代表,正通過精妙的設計將冰冷的科技轉化為有溫度的康復力量。它不僅是功能的延伸,更是希望與獨立的賦予者,深刻詮釋著“設計為人”的本質,引領著康復醫療進入一個更精準、更高效、更人性化的新時代。